My wife had a cheery thought the other week, “How to do we provide for our cats when we’re gone?” This turned into a discussion of what would happen if we were both run over by a bus or died in a plane crash – who would feed the cats before it was too late? Morbid as it may be, there is a real problem to solve here as cats can only survive a matter of days without water and hepatic lipidosis can be kill a starving cat in just a few days too – so there’s actually quite a narrow window for help to arrive, and as we both live thousands of miles from our families, there are several scenarios that could mean help wouldn’t arrive until after it was too late.
So what to do?
Well, turn to IoT of course! I now have a challenge – how do we alert friends and family to the urgent cat peril should the worst happen? After ruling out various camera related options, pressure sensors under food bowls and water level sensors, I arrived at the simple conclusion that provided we could detect humans crossing into the kitchen, where the cat food is, then we could assume that all was well (when we’re away on vacation, we have cat sitters that look after the house and the cats).
Now that we’ve turned the problem into one of how to detect humans entering the kitchen, it’s much more fun. At first I was tempted to use an ultrasonic range detector to determine if people were walking through the kitchen door, but in theory cats can hear the ultrasonic frequencies concerned and whilst our 2 cats didn’t seem to notice it at all, rather than cause them any long term stress I went looking for another option.
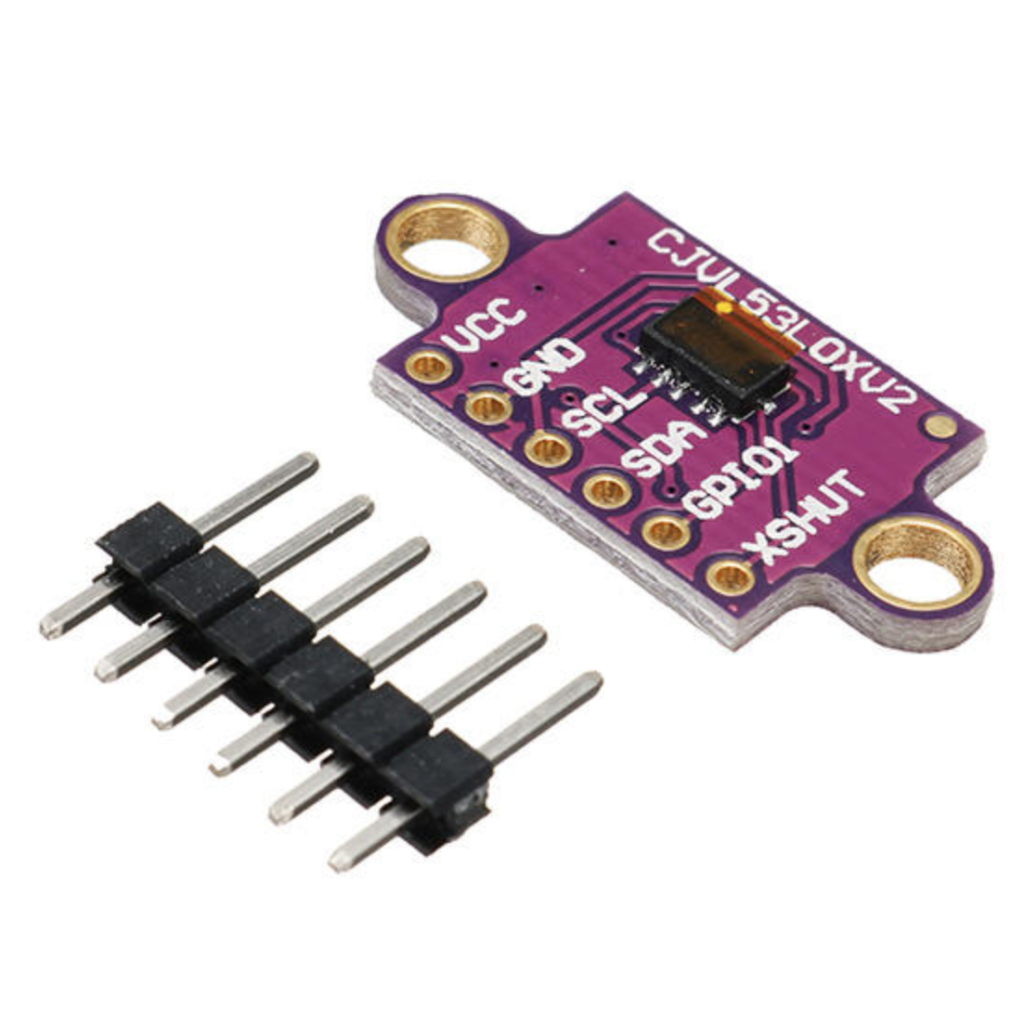
Enter the tiny VL53L0X time of flight sensor that can measure accurately distances up to about 1200mm, which is perfect for measuring whether someone is coming through a doorway or not.
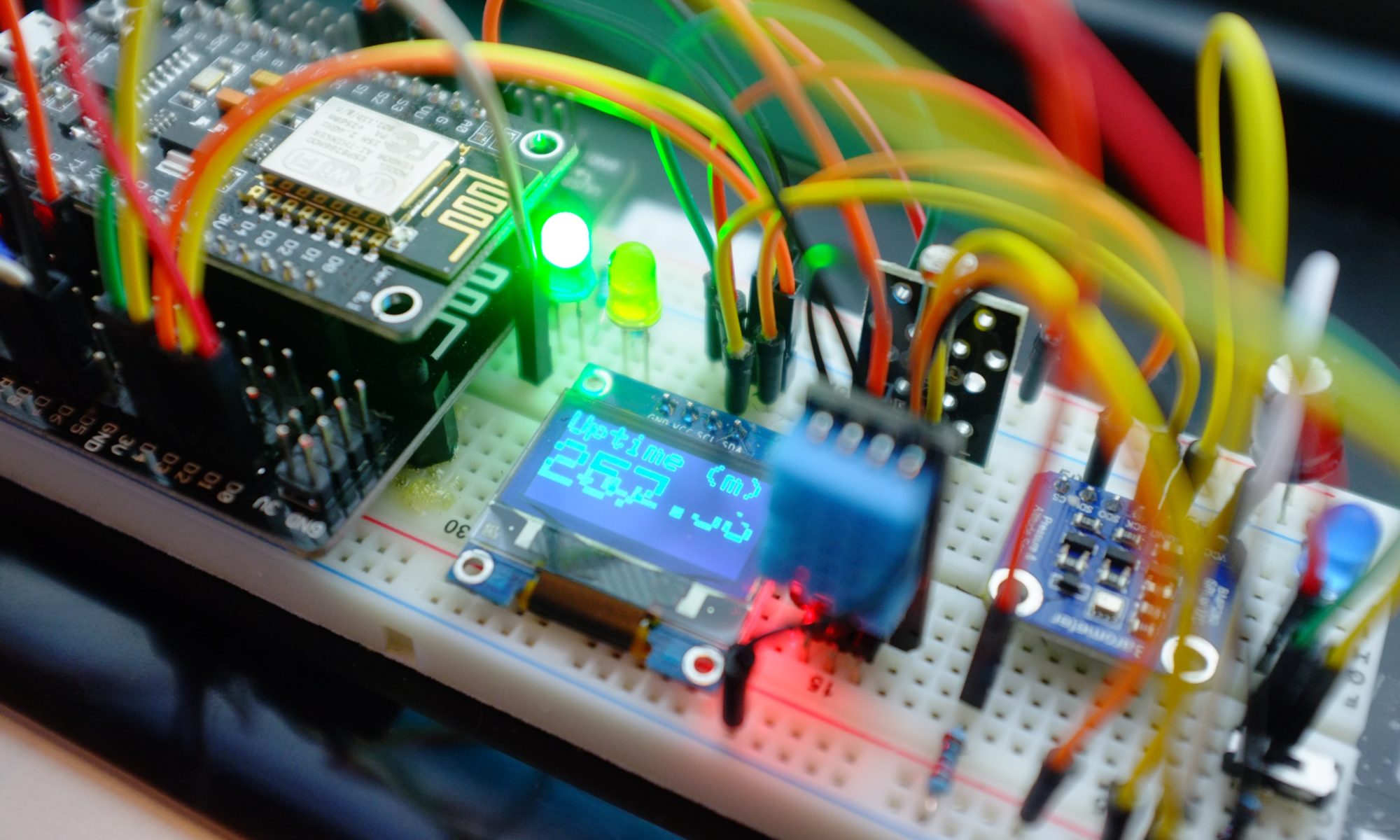
Using an ESP8266 based MCU from Adafruit, I soon had the sensor all packaged up in a small project box and secured to the kitchen door. As you can see, I put the power connector on the wrong side of the box (or the window for the TOF sensor, depending on how you look at it) – but it’s connected up and works a treat. As you can see, Mette the cat is most impressed!

The software on the Micro-controller calculates and stores the moving average of the reported distance in front of the sensor every 50ms for 320 samples (so 16 seconds of time). If it detects that something has happened, it sends all 320 samples to AWS IoT for additional analysis, otherwise it sends nothing to save on data that isn’t useful.
Plotting the data that arrives when something has been detected results in graphs a bit like this;
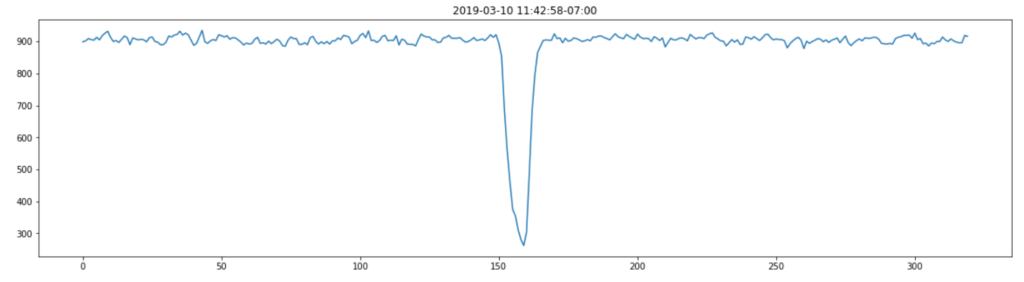
Notice how the observed distance is typically around 900mm (the distance across the door) but when someone walks in front, there is an easily recognisable pulse that we can use to state that someone has walked in or out of the kitchen – and since that is where the cat food lives, we can make the further assumption that someone is feeding the cats.
Interestingly, not all spikes are what you might think. Here’s one that happened when we were out of the house.
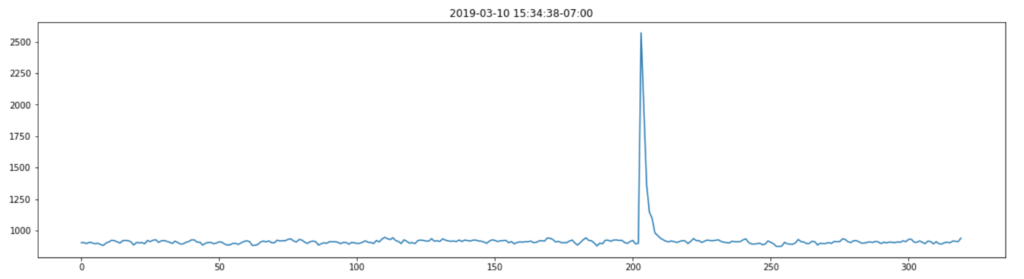
Notice that this time, the observed distance jumped UP and I think what happened here was that a glint of sun caught the sensor – so I’ll be tweaking my algorithm to ignore spikes that go in the wrong direction like this for the next iteration!
So, we have the basic technology in place, every time we think we’ve seen something cross in front of the sensor, we’ll send the data to AWS IoT – but how do we use this to save our cats? In part two we’ll cover how we used AWS IoT Analytics to build the workflow that keeps track of when the cats might have been last fed and alerts key people if something is not as it should be.